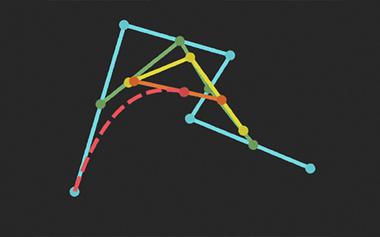
这次我们来看如何把矩阵A经过变换后的向量再还原回去。观察下面如何从变换后的向量(-1.5, 2)还原为向量(1, 0.5) 的过程:
图1
注意观察要点:
● 变换后线性空间还是完整的二维空间;
● 变换后的行列式为不等于0;
● 还原后仅有一个向量与之对应;
整个还原的变换实际上对应了另一个线性变换,称为矩阵的逆(Inverse),记为A-1。
矩阵与它的逆矩阵相乘,那就是先做了一次变换,然后在还原回来,这两个连续的变换作用就是矩阵的乘法,相当于什么都没有改变,这个没有进行任何改变的变换,就是上次说提到的单位矩阵。
利用这个性质,我们可以通过在Ax=V两边同乘A的逆矩阵来求出变换前的向量x:

那么问题在于逆矩阵是否一定能找得到呢?想象当det(A) = 0时候,也就是代表矩阵的变换将空间压缩到更低的维度上,此时没有逆矩阵。在二维平面中变换后空间被压缩到原点以及被压缩为一条直线都是不存在相应的逆矩阵。或者说没有办法找到对应的映射可以将一个点或一条线还原为平面。
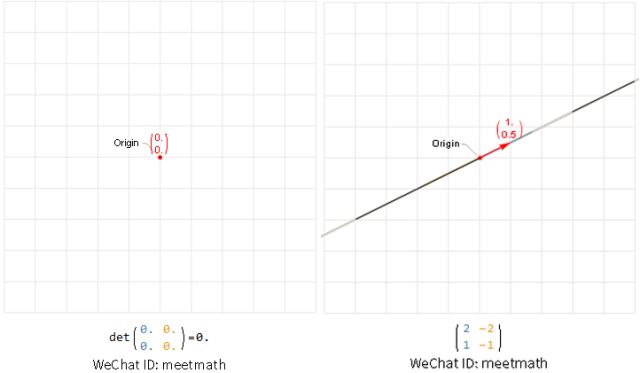
图2
类似地,对于三维空间中,如果一个变换将空间压缩为一个平面,一条直线或原点,也就是都对应det(A) = 0(体积为0)时,那么也没有逆变换。请看下面矩阵将空间压缩为平面的情况:
图3
对角矩阵的情况
对角矩阵对应的变换就是沿着坐标轴伸缩变换,那么还原就非常简单了,只需要将各坐标轴伸缩为倒数倍就好了。
但注意即使不存在逆变换,但对应的x仍然可能存在。当一个变换将空间压缩到一条直线,但是向量v刚好就在这条直线上。如下面矩阵A将空间压缩成一条直线,向量v(1,0.5)因为恰好落在该条线上,所以相应的x为(0.25,-0.25)。
图4
上面就是本次图解线性代数所回顾的知识点。好了,现在让我们在下一篇的中再见!
因为本人水平有限,疏忽错误在所难免,还请各位老师和朋友多提宝贵意见,帮助我改进这个系列,您的关注和转发就是鼓励我继续前行的最大动力,感谢感谢!
声明:文章转自【遇见数学】微信公众号,版权归原作者所有,转载仅供学习使用,不用于任何商业用途,如有侵权请联系删除,谢谢。